
What is the biggest gap in robotics research?
There are two major gaps that we should at least investigate as part of the process of defining robotics as a discipline.
1. We don’t have positive laws. Our history is still largely trial and error and scavenging from other disciplines, rather than the development of foundational design principles or laws governing the creation or operation of robots in general.
We do have recognizable (tongue-in-cheek) negative laws, roughly equivalent to Murphy’s Law.
The First Law of Robotics: You’re wrong (you set the parameters wrong, the user doesn’t need the robot to do whatever it was you thought they wanted, your model of the environment was wrong, etc.);
The Second Law of Robotics: On a good day, half the robots in your lab are actually working (alternate version: Your robot is working a little over (or under) half the time. This has actually been demonstrated in two longitudinal studies);
The Third Law of Robotics: All demos are faked or staged in some way (if you want to demonstrate a particular behavior or capability, you need to stage the demo so that that specific behavior or capability is required);
The Fourth Law of Robotics: The likelihood of something going wrong with the demo is proportional to the importance of the people you’re putting it on for;
Corollary to the Fourth Law: The thing that goes wrong with your demo will be unrelated to what you are trying to demonstrate, but will completely prevent you from demonstrating the important part of your work.
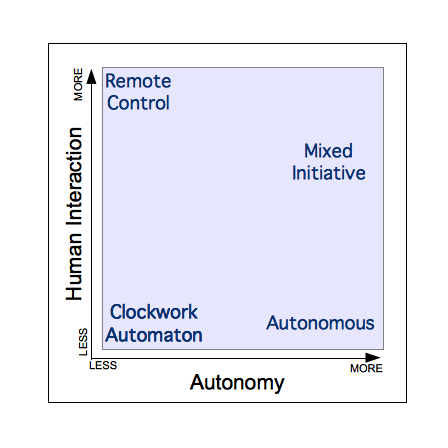
2. We have trouble defining the space in which we work. For example, autonomy means to operate without outside control, but the human intervention axis is demonstrably not equivalent to the autonomy axis.
Since one of the most common categorization tools for levels of autonomy does not make this distinction clear, a simple example is provided.
We can define four extreme types of robots:
- Clockwork Automaton: robots that do the same thing, every time you start them, without any feedback from sensors (or even communications) about their environment. They are incapable of changing their actions, but require no human intervention once activated. A wind-up toy is the simplest example of these, but extremely complex mechanisms have been built.
- Remote Control: robots that need to be given explicit direction from a human operator at all times; without continuous input from the operator, they will simply stop moving.
- Mixed Initiative: robots that interact with their human operators to determine the best course of action – these are autonomous systems that can make suggestions to their operators and sometimes act on their operators’ suggestions and sometimes act on the basis of their own decisions.
- Autonomous: robots that can perform tasks robustly in unconstrained environments based on local sensing without any human intervention. These include everything from a Roomba(TM) to Chappie.
On the human intervention axis, clockwork and autonomous robots lie at the “less” end of the scale, while remote control and mixed-initiative systems both involve significant human interaction. On the autonomy axis, clockwork and remote control robots lie at the “none” end of the scale while autonomous and mixed-initiative systems demonstrate significant autonomy.
Mixed initiative robots require less interaction than remote control robots, but the quality of that interaction requires more expertise and understanding of the problem and the environment. The purpose of the human in a remote control system is to provide the low level feedback loop in the controller linking the sensory inputs and the motor outputs. The purpose of the human in a mixed initiative system is to work with the robot to jointly develop a solution to a complex problem and to provide the additional context not available to the robot. No robots have no interaction with a human. Even clockwork automata and fully autonomous robots have at least one interaction with a human – neither can start until a human activates a mechanism or sends a command.
But the core problem associated with both gaps is that the space represented by this diagram involves many, many different kinds of robots, performing many, many different kinds of jobs.
In some ways, this is like mathematics — both robotics and mathematics involve the study of many apparently disparate approaches to understanding the world, unified by a philosophical approach to problem solving, and both result in tools that are useful to many disciplines outside their own.
In mathematics, we have logic and proofs, algebra, geometry, and calculus, set theory and probability. In robotics, we have physical platform designs, perception, actuation, and manipulation, planning and decision making.
In mathematics, we have a philosophical approach to understanding the world that revolves around the definition of number and the definition of object. In robotics, we have a philosophical approach to understanding the world that revolves around the actions required to achieve a goal.
In mathematics we have interest rates and statistical analysis supporting the financial industry, we have Fourier transforms describing electrical and acoustic waveforms, enabling us to listen to recorded music and communicate with people in space and around the world, and we have boolean logic, providing the underpinning for all the binary manipulations occurring in every computer we make.
In robotics, we have vacuum cleaners in peoples’ homes, we have robots that package, robots that assemble, and robots that deliver, and we have robots that swim and fly and tunnel, gathering information about hurricanes and pipes and volcanos.
What mathematics has that robotics doesn’t have is clearly spelled out foundations. In mathematics, we know that before you can do mathematics rather than arithmetic, before you can really think like a mathematician, you need a bunch of fundamental tools. Before you can really understand calculus, it’s important to understand algebra, and before you understand algebra, it’s important to understand the basics: addition, subtraction, multiplication, division, fractions, and graphs. The mathematics community largely agrees on what those fundamental tools are, just like the electrical engineering community largely agrees that Ohm’s Law is a fundamental tool in understanding electricity.
So I suppose I should change my answer: the largest gap in robotics as a discipline is the lack of agreement on what constitutes the fundamental tools of our trade.